|
I'm a senior undergraduate student at Xingjian College, Tsinghua University, and an incoming Ph.D. student at MMLab, CUHK. My recent research mainly focuses on native multimodal pretraining and spatial intelligence. I also work with collaborators on visual generation, embodied intelligence, and LLM/VLM reasoning. Now I'm working closely with Prof. Gao Huang and Prof. Hongsheng Li. If you are also interested in my research, please feel free to contact me. CV / Google Scholar / Github / Twitter WeChat: qihang_peng Email: pengqihang22@gmail.com |

|
|
|
*Equal contribution |
|
Qwen Team (Qihang Peng as Core Contributor) Tech Report, 2026 [arXiv] [Blog] A generalist robotic manipulation foundation model that aligns representations, motions, and behaviors across 15 robot platforms. Trained on ~38,100 hours of pre-training data. Ranks first on RoboChallenge and surpasses π0.5 across 6 OOD benchmarks. |
|
Qwen Team (Qihang Peng as Core Contributor & Co-first Author) Tech Report, 2026 [arXiv] [Blog] A unified navigation model built on Qwen3-VL spanning 5 task families with 15.6M training samples. Achieves SOTA on VLN-CE RxR, HM3Dv2, EVT-Bench, and NAVSIM with real-world deployment on Unitree Go2 quadruped robot. |
|
Qwen Team (Qihang Peng as Contributor) Tech Report, 2026 [arXiv] [Blog] A language-conditioned video world model with dual-stream MMDiT and MLLM action encoding, trained on 8.6M video-text pairs across 20+ robot morphologies. Ranks #1 on EWMBench, DreamGen Bench, and leads open-source models on WorldModelBench and PBench. |

|
Qihang Peng, Xuesong Chen, Chenye Yang, Shaoshuai Shi, Hongsheng Li IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 [arXiv] [Code] [Project Page] 
ColaVLA moves VLM reasoning into a compact latent space and decodes multi-scale causal trajectories in one pass. State-of-the-art in both open-loop and closed-loop settings with favorable efficiency and robustness on the nuScenes benchmark. |
|
Qihang Peng, Henry Zheng, Gao Huang IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 [arXiv] [Code] [Project Page] Make full use of multimodal information in ego-centric 3D visual grounding for point enhancement. State-of-the-art on the EmbodiedScan benchmark. |
|
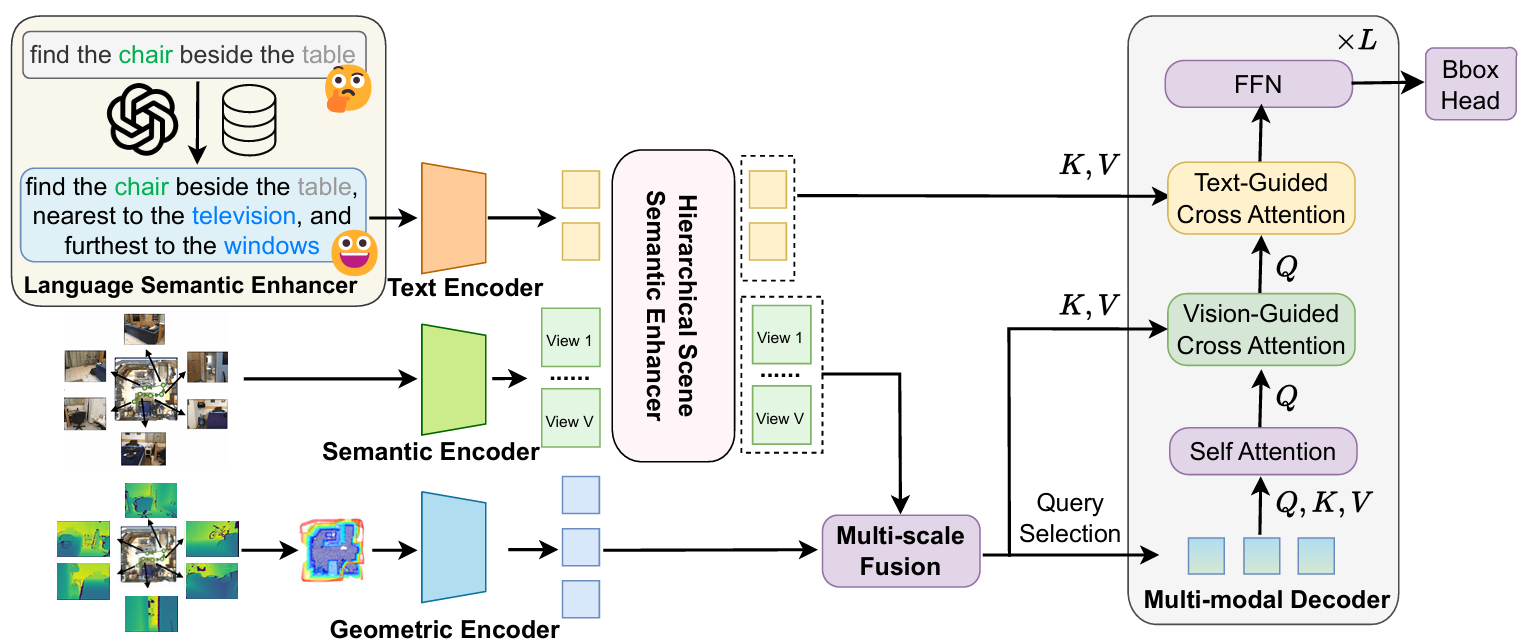
Henry Zheng*, Shi Hao*, Qihang Peng, et al. International Conference on Learning Representations (ICLR), 2025 [arXiv] [ICLR 2025] [AGC 2024] Use LLM and Ground Truth to enhance semantic details in prompt to reduce the ambiguity during training. Extract individual view semantics and enrich visual representation with global scene-level semantic. |
|
|

|
Tsinghua University
B.Eng. in Mechanics & Vehicle Engineering Sep. 2022 - Jun. 2026 (Expected) Rank 1st in major with National Scholarship |
|
|

|
Qwen Team, Alibaba Group
Research Intern, working on Embodied Intelligence and VL Pretraining. Apr. 2026 - Present Advised by Dr. Xiong-Hui Chen and Shuai Bai |

|
Voyager Research, Didi AutoDriving
Research Intern, working on VLAs for autonomous driving. Jul. 2025 - Mar. 2026 Advised by Dr. Shaoshuai Shi |

|
LeapLab, Tsinghua University
Research Assistant, working on 3D visual grounding. Feb. 2024 - May 2025 Advised by Prof. Gao Huang |
|
|
|
[Midterm Lecture] [Final Lecture] |
|
|
|
|